







Промышленный робот-пробоотборник завод
Промышленный отбор проб – задача, часто недооцениваемая, но критически важная для контроля качества и оптимизации производственных процессов. Многие считают, что это просто механическая процедура, но на деле это сложная система, требующая точности, надежности и адаптивности. Особенно актуально это для современного производства, где важна не только скорость, но и минимизация человеческого фактора. В этой статье я поделюсь своим опытом работы с промышленными роботами-пробоотборниками и расскажу о типичных проблемах и подходах к их решению.
Почему ручной отбор проб – это устаревший подход?
Исторически, отбор проб выполнялся вручную. Это, конечно, недорого, но крайне подвержено ошибкам. Человеческий фактор – это всегда вероятность пропустить образец, получить загрязненный или, наоборот, взять несколько образцов. А в некоторых отраслях, например, в химической промышленности или пищевой, это может привести к серьезным последствиям – от брака до штрафных санкций. Кроме того, ручной отбор проб занимает много времени и требует квалифицированного персонала, что увеличивает общую стоимость производства.
В нашей практике (АО Цзянсу Ивэйда Умные Технологии, [https://www.evidasampling.ru/](https://www.evidasampling.ru/)) мы часто сталкиваемся с ситуациями, когда компании осознают необходимость автоматизации, но боятся сложности внедрения. Изначально многие недооценивают требования к точности и надежности, а также стоимость начальных инвестиций. Но, как правило, в долгосрочной перспективе, автоматизация всегда окупается.
Например, у одного из наших клиентов (производитель полупроводников) ручной отбор проб для контроля качества полупроводниковых пластин занимал около 2 часов на каждую партию. Часто возникали проблемы с загрязнением образцов и непостоянством результатов. После внедрения промышленного робота-пробоотборника с системой машинного зрения, время сократилось до 30 минут, а точность значительно возросла. И, самое главное, сотрудники получили возможность заниматься более квалифицированной работой.
Типичные проблемы при внедрении автоматизированных систем
Несмотря на очевидные преимущества, внедрение промышленного робота-пробоотборника может столкнуться с рядом трудностей. Например, выбор подходящего робота и системы захвата образцов – это непростая задача, требующая учета множества факторов: типа образца, скорости отбора, точности, размеров рабочей зоны и т.д. Неправильный выбор может привести к низкой эффективности системы и высоким затратам на обслуживание.
Другая проблема – это интеграция с существующими производственными процессами и системами управления. Это требует тщательного планирования и разработки интерфейсов, чтобы обеспечить бесперебойную работу всей системы. Мы часто помогаем нашим клиентам с этим этапом, разрабатывая индивидуальные решения, учитывающие их специфические потребности.
Важно помнить о необходимости обучения персонала работе с новой системой. Недостаточная подготовка может привести к ошибкам в эксплуатации и снижению эффективности работы робота-пробоотборника.
Ключевые компоненты эффективной системы отбора проб
Эффективная система автоматизированного отбора проб состоит из нескольких ключевых компонентов. Первым – это, конечно, сам промышленный робот. Здесь важны его грузоподъемность, скорость, точность и диапазон движений. Также важно учитывать тип робота – SCARA, 6-осевой или другие. Выбор зависит от конкретных требований задачи.
Вторым компонентом является система захвата образцов. Это могут быть вакуумные захваты, механические захваты, или системы с использованием магнитов или оптических датчиков. Выбор зависит от типа образца и необходимости сохранения его целостности.
Третьим важным компонентом является система машинного зрения. Она позволяет роботу определять положение образца и точно захватывать его. Современные системы машинного зрения способны распознавать сложные объекты и работать в условиях плохой освещенности.
Кроме того, необходимо предусмотреть систему контроля и управления, которая обеспечивает координацию работы всех компонентов системы и позволяет контролировать процесс отбора проб. Многие системы позволяют собирать и анализировать данные об отборе проб, что позволяет оптимизировать производственные процессы.
Пример из практики: отбор проб на литейном производстве
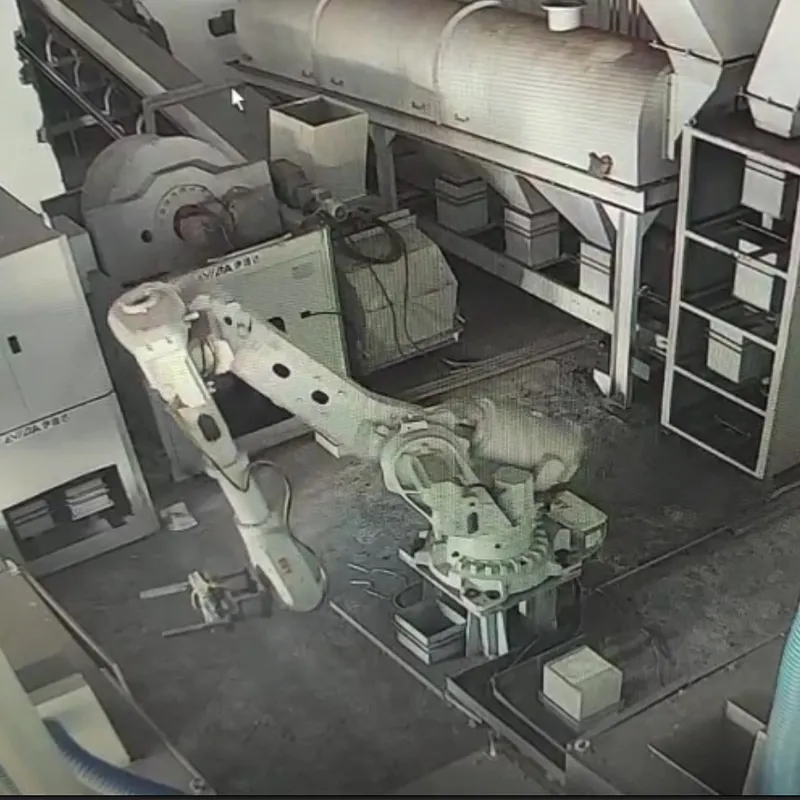
Недавно мы внедрили систему промышленного робота-пробоотборника на литейном производстве. Задача заключалась в автоматическом отборе проб из отливок для контроля качества. Раньше отбор проб выполнялся вручную, что занимало много времени и требовало высокой квалификации операторов. Кроме того, часто возникали проблемы с загрязнением образцов и непостоянством результатов.
Мы использовали 6-осевой робот с системой машинного зрения и вакуумными захватами. Система была интегрирована с системой управления литейным оборудованием, что позволило автоматически запускать отбор проб после завершения заливки отливки. Результат – время отбора проб сократилось в несколько раз, а точность возросла.
Важным моментом было обучение персонала работе с новой системой. Мы разработали программу обучения, включающую теоретические занятия и практические упражнения. Теперь операторы могут заниматься более квалифицированной работой – анализом результатов отбора проб и оптимизацией производственных процессов.
Будущее автоматизации отбора проб
Я уверен, что будущее автоматизации отбора проб связано с развитием искусственного интеллекта и машинного обучения. В будущем роботы-пробоотборники будут способны самостоятельно принимать решения о выборе оптимального метода отбора проб, а также адаптироваться к изменяющимся условиям производства. Кроме того, мы видим тенденцию к интеграции промышленных роботов-пробоотборников с системами Интернета вещей (IoT), что позволит собирать и анализировать данные о работе системы в режиме реального времени.
Например, мы сейчас разрабатываем систему, которая использует искусственный интеллект для анализа изображений образцов и автоматической классификации их по качеству. Это позволит сократить время на анализ результатов отбора проб и улучшить качество контроля.
В заключение хочу сказать, что автоматизация отбора проб – это не просто тренд, а необходимость для современного производства. Внедрение промышленного робота-пробоотборника позволяет повысить эффективность, снизить затраты и улучшить качество продукции. Главное – правильно выбрать решение и грамотно его внедрить.
Соответствующая продукция
Соответствующая продукция


Самые продаваемые продукты
Самые продаваемые продукты-
 Система пробоподготовки для промышленных роботов в горнодобывающей промышленности
Система пробоподготовки для промышленных роботов в горнодобывающей промышленности -
 Шлифовальная машина
Шлифовальная машина -
 Валковая дробилка
Валковая дробилка -
 Система управления электрооборудованием
Система управления электрооборудованием -
 Система пробоподготовки для промышленных роботов в угольной промышленности
Система пробоподготовки для промышленных роботов в угольной промышленности -
 Система отбора и пробоподготовки в вагонах с помощью промышленных роботов
Система отбора и пробоподготовки в вагонах с помощью промышленных роботов -
 Ротационный прободелитель
Ротационный прободелитель -
 Дробилка челюстная
Дробилка челюстная -
 Роботизированный пробоподготовительный комплекс для агломерата
Роботизированный пробоподготовительный комплекс для агломерата -
 Автоматическая аналитическая система с пластинчатым расплавом
Автоматическая аналитическая система с пластинчатым расплавом -
 Высокоточный интеллектуальный столбчатый ленточный весоизмеритель
Высокоточный интеллектуальный столбчатый ленточный весоизмеритель -
 Система отбора и пробоподготовки в средней части ленточного конвейера
Система отбора и пробоподготовки в средней части ленточного конвейера