







Промышленный робот-пробоотборник с помощью спирального бура
Сразу скажу, что тема промышленного робота-пробоотборника не так уж и нова, но действительно – это не просто модный тренд, а реальная необходимость в многих производствах. Часто, когда речь заходит о автоматизации отбора проб, сразу вспоминают лабораторные роботы. А ведь на крупных заводах, особенно в металлургии, горнодобывающей промышленности, цементном производстве, потребность в надежном и автономном способе сбора проб прямо 'на месте' становится критичной. Не все процессы позволяют транспортировать образец в лабораторию – риск загрязнения, изменение структуры, просто логистические сложности. Именно здесь и приходит на помощь робот-пробоотборник с использованием, например, спирального бура.
Почему спиральный бур – не просто альтернатива?
В теории, можно использовать и другие методы отбора проб – кернеры, шнеки и т.д. Но, на практике, именно спиральный бур показался нам наиболее эффективным и универсальным решением. Главное преимущество – способность проводить отбор проб в различных типах материалов: от относительно мягкого цемента до твердых горных пород. И он может быть адаптирован под разные диаметры отбора, что, опять же, критично для разных типов пробоотбора. Мы, как компания АО Цзянсу Ивэйда Умные Технологии, специализируемся на разработке и внедрении автоматизированных систем, и этот выбор мы сделали, исходя из большого количества тестовых испытаний. Конечно, у спирального бура есть и свои недостатки – возможна некоторая степень деформации образца, особенно при работе с хрупкими материалами. Но это компенсируется высокой надежностью и возможностью проведения отбора проб в труднодоступных местах.
Стоит отметить, что не все спиральные буры одинаковы. Важно учитывать материал бура, его геометрию, скорость вращения, давление при бурении. Неправильный выбор может привести не только к ухудшению качества образца, но и к поломке оборудования. Нам приходилось столкнуться с ситуациями, когда дешевый бур 'застревал' в материале, требуя длительного времени на извлечение и, как следствие, снижая эффективность всего процесса. Мы тщательно тестируем все компоненты перед внедрением в промышленную среду. Этот момент часто упускают, ориентируясь только на общую концепцию автоматизации.
Проблемы интеграции: автоматизация – это не просто робот
Собственно, промышленный робот-пробоотборник – это лишь часть системы. Интеграция его в существующий производственный процесс – задача нетривиальная. Нам приходилось разрабатывать собственные алгоритмы управления роботом, учитывающие особенности производственной линии, требования к точности отбора проб, необходимость синхронизации с другими технологическими процессами. Просто 'заставить' робота бурить в определенном месте – недостаточно. Необходимо учитывать угол наклона, скорость, давление и т.д. И конечно, нужно обеспечить безопасную работу робота, особенно если он работает рядом с людьми.
Одной из распространенных проблем, с которыми мы сталкиваемся, является обеспечение стабильности и точности позиционирования робота. Даже небольшие колебания могут привести к отклонениям от заданной траектории бурения и, как следствие, к некачественным образцам. Для решения этой проблемы мы используем системы визуального контроля и коррекции траектории. Это позволяет компенсировать небольшие ошибки в позиционировании и обеспечить высокую точность отбора проб. Еще один аспект – данные, которые собираются с робота. Они должны быть структурированы и доступны для дальнейшего анализа. Мы стараемся разрабатывать системы, которые позволяют автоматически генерировать отчеты об отборе проб, включая информацию о времени, дате, глубине и других параметрах.
Пример реализации: Цементный завод
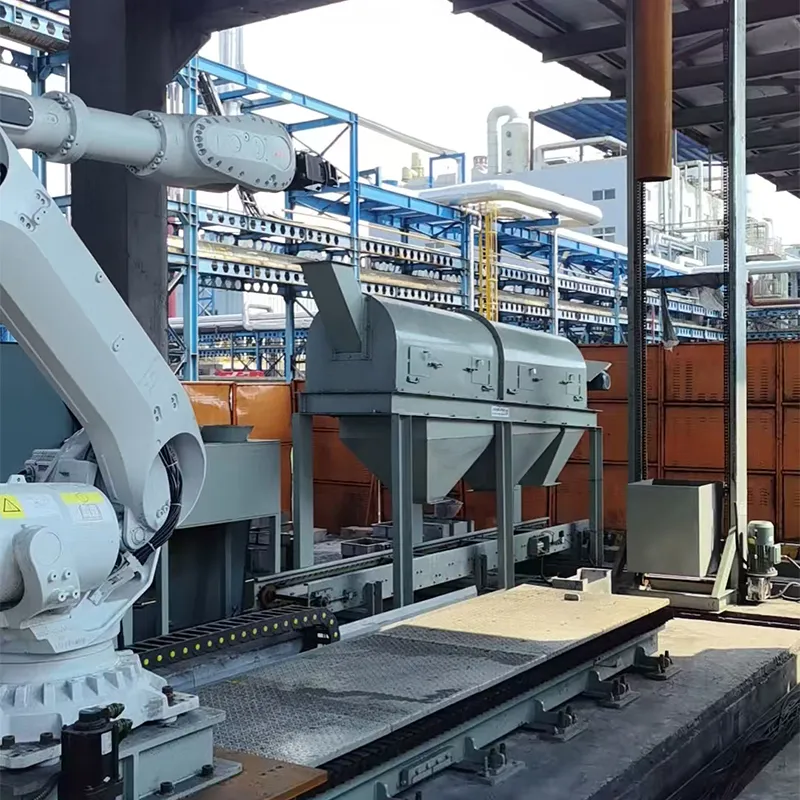
Недавно мы реализовали проект по автоматизации отбора проб цементного сырья на одном из крупнейших цементных заводов в регионе. Задача заключалась в том, чтобы заменить ручной отбор проб, который занимал много времени и был подвержен человеческому фактору, на автоматизированный процесс, обеспечивающий более высокую точность и скорость. Мы использовали робота-пробоотборника с спиральным буром, интегрированного в существующую систему управления производством. Система позволяет автоматически запускать процесс отбора проб по заданному графику, собирать данные о параметрах сырья и передавать их в систему аналитики. Результат – сокращение времени отбора проб на 70%, повышение точности и снижение затрат на персонал.
Самым сложным этапом реализации проекта была интеграция робота в существующую систему автоматизации завода. Здесь возникли проблемы с совместимостью протоколов связи и необходимостью адаптации программного обеспечения. Но благодаря тесному сотрудничеству с инженерами завода нам удалось решить эти проблемы и успешно запустить систему в эксплуатацию. Этот опыт показал, что автоматизация – это не просто установка нового оборудования, а комплексный процесс, требующий тщательного планирования и координации.
Использование датчиков для контроля процесса бурения
Очень часто, для повышения качества отбора проб, используются дополнительные датчики, контролирующие параметры процесса бурения. Например, датчик момента усилий, который позволяет отслеживать давление на бур и предотвращать его поломку, или датчик вибрации, который сигнализирует о возможных проблемах с буром или установкой. Мы часто добавляем такие датчики в наши решения, поскольку это позволяет повысить надежность и безопасность работы робота-пробоотборника.
Перспективы развития: ИИ и адаптивное управление
В будущем, мы видим большой потенциал в использовании искусственного интеллекта (ИИ) для управления промышленными роботами-пробоотборниками. Например, ИИ может использоваться для адаптации траектории бурения к различным типам материалов, для оптимизации скорости и давления, для выявления аномалий в процессе отбора проб. Это позволит повысить эффективность и надежность работы робота, а также снизить затраты на обслуживание. Мы уже начали разрабатывать прототипы систем, использующих ИИ для управления роботами-пробоотборниками, и первые результаты очень многообещающие. Также, активно развивается направление адаптивного управления, когда робот самостоятельно корректирует свои действия в зависимости от изменяющихся условий, например, от вязкости материала или от наличия препятствий.
Нам кажется, что промышленные роботы-пробоотборники – это технология будущего, которая будет играть все более важную роль в автоматизации производственных процессов. Мы уверены, что наши разработки и опыт помогут нашим клиентам повысить эффективность, надежность и безопасность их производства.
Соответствующая продукция
Соответствующая продукция


Самые продаваемые продукты
Самые продаваемые продукты-
 Автоматическая аналитическая система с пластинчатым расплавом
Автоматическая аналитическая система с пластинчатым расплавом -
 Дробилка челюстная
Дробилка челюстная -
 Система пробоподготовки для промышленных роботов в горнодобывающей промышленности
Система пробоподготовки для промышленных роботов в горнодобывающей промышленности -
 Высокоточный интеллектуальный столбчатый ленточный весоизмеритель
Высокоточный интеллектуальный столбчатый ленточный весоизмеритель -
 Шлифовальная машина
Шлифовальная машина -
 Система отбора и пробоподготовки на головке ленточного конвейера
Система отбора и пробоподготовки на головке ленточного конвейера -
 Система пробоподготовки для промышленных роботов в коксовой промышленности
Система пробоподготовки для промышленных роботов в коксовой промышленности -
 Система управления электрооборудованием
Система управления электрооборудованием -
 Система пробоподготовки для промышленных роботов в угольной промышленности
Система пробоподготовки для промышленных роботов в угольной промышленности -
 Молотковая дробилка
Молотковая дробилка -
 Система отбора и пробоподготовки в средней части ленточного конвейера
Система отбора и пробоподготовки в средней части ленточного конвейера -
 Система отбора и пробоподготовки в вагонах автомобильных кузовов мостового типа
Система отбора и пробоподготовки в вагонах автомобильных кузовов мостового типа
Связанный поиск
Связанный поиск- Ротационный прободелитель заводы
- Ленточный конвейер
- Молотковая дробилка для камня
- Технические условия для валковых дробилок поставщик
- Дробилка завод
- Ленточный конвейер производитель
- Принцип действия валковой дробилки
- Мобильная дробилка поставщик
- Дробилка молоткова производитель
- Принцип молотковой дробилки заводы