







Устройство промышленного робота
Промышленные роботы… Многие видят в них огромных, громоздких монстров, способных выполнять любую задачу. Да, некоторые действительно такие, но современный промышленный робот – это гораздо более гибкий и 'умный' инструмент. На самом деле, часто возникает путаница между сложными роботизированными системами и базовыми, относительно простыми манипуляторами. Мы попробуем разобраться, что же скрывается под этим понятием, и какие нюансы важно учитывать при проектировании и эксплуатации.
Основные компоненты и их взаимодействие
В основе любого промышленного робота лежит несколько ключевых компонентов: механика, электроника и программное обеспечение. Механическая часть, разумеется, включает в себя рабочую голову (effector), которая непосредственно взаимодействует с обрабатываемым объектом. Это может быть захват, сварочный аппарат, покрасочный пистолет – все зависит от задачи. Затем идет кинематическая цепь: звенья, шарниры, оси, обеспечивающие движение рабочей головы в пространстве. Здесь важно учитывать множество факторов – грузоподъемность, точность, скорость перемещения. И, конечно, силовые приводы: электродвигатели, пневматические или гидравлические цилиндры, обеспечивающие необходимое усилие для работы.
Электронная часть – это 'нервная система' робота. Включает в себя контроллер (или процессор), который отвечает за управление всеми процессами. Датчики – это глаза и уши робота: энкодеры, датчики силы, датчики положения, предоставляющие информацию о текущем состоянии системы и окружающей среде. А еще - силовая электроника для управления двигателями и исполнительными механизмами. Если говорить о современные системы – то это сложные, высокопроизводительные платы с мощными процессорами и специализированными DSP-чипами.
Не стоит забывать и о программном обеспечении. Оно позволяет задавать траектории движения, координировать работу всех компонентов и взаимодействовать с внешними системами, такими как системы управления производством (MES) или системы планирования ресурсов предприятия (ERP). И сейчас все больше внимания уделяется системам машинного зрения и искусственного интеллекта для повышения адаптивности роботов.
Типы приводов и их применение
Выбор типа привода – это один из ключевых аспектов при проектировании промышленного робота. Наиболее распространенные – это электродвигатели. Существуют различные типы: AC, DC, шаговые двигатели. Каждый тип имеет свои преимущества и недостатки, и выбор зависит от требований к точности, скорости, крутящему моменту и энергоэффективности.
Раньше часто использовались пневматические и гидравлические приводы, особенно в тяжелой промышленности. Сейчас они уступают место электродвигателям, хотя все еще находят применение в некоторых нишах, где требуется высокая мощность и надежность. Например, в станках с ЧПУ или в экструдерах.
Однако, последнее время набирают популярность серводвигатели с обратной связью. Они позволяют добиться высокой точности и повторяемости движения, что критически важно для многих производственных процессов. А еще, благодаря современным контроллерам, появилась возможность реализации сложных траекторий и динамического управления роботом. Мы, например, в АО Цзянсу Ивэйда Умные Технологии часто используем серводвигатели для роботизированных линий сборки электроники.
Проблемы и вызовы в проектировании и эксплуатации
Работа с промышленным роботом – это не всегда гладко. Одной из основных проблем является обеспечение безопасности. Роботы – это мощные машины, которые могут представлять опасность для человека. Поэтому необходимо предусмотреть различные системы защиты – световые барьеры, концевые выключатели, аварийные кнопки. А еще, необходимо правильно организовать рабочее пространство и обеспечить обучение персонала.
Другая проблема – это сложность настройки и программирования робота. Для этого требуются специальные знания и навыки. Иногда приходится сталкиваться с проблемами с совместимостью различных компонентов или с ошибками в программе. К тому же, роботы требуют регулярного обслуживания и технического обслуживания, чтобы обеспечить их надежную работу. Особенно это касается систем смазки, охлаждения и контроля состояния.
Еще одна, часто упускаемая из виду проблема, это выбор оптимального алгоритма управления. Сложно подобрать параметры, которые обеспечивают высокую точность, скорость и стабильность работы робота при различных условиях. Часто приходится прибегать к экспериментам и оптимизации.
Пример из практики: автоматизация упаковки
Недавно мы занимались проектом по автоматизации линии упаковки продукции для одного клиента. Задача была в том, чтобы роботизированная система могла сортировать продукты по размеру, упаковывать их в коробки и маркировать этикетками. Изначально мы планировали использовать простой манипулятор с пневматическими захватами. Но потом, после нескольких тестовых запусков, поняли, что такого рода система не обеспечит требуемой точности и скорости.
В итоге мы решили использовать серводвигатель и более сложный захват с датчиками силы. Это позволило нам добиться высокой точности и надежности работы системы. Но пришлось попотеть с алгоритмом управления – чтобы обеспечить плавность и скорость захвата и упаковки. Особенно сложным оказалось управление датчиками силы, чтобы не повредить продукцию при упаковке.
Этот проект показал нам, что промышленный робот – это не просто машина, а сложная система, требующая комплексного подхода к проектированию и эксплуатации. И даже с современными технологиями, всегда есть место для улучшений и оптимизации. Например, сейчас мы активно работаем над внедрением систем машинного зрения для автоматической идентификации продуктов и адаптации программы управления к их характеристикам. Мы верим, что именно это – будущее промышленного робота.
Соответствующая продукция
Соответствующая продукция


Самые продаваемые продукты
Самые продаваемые продукты-
 Система управления электрооборудованием
Система управления электрооборудованием -
 Полностью закрытый весовой дозатор угля (материала)
Полностью закрытый весовой дозатор угля (материала) -
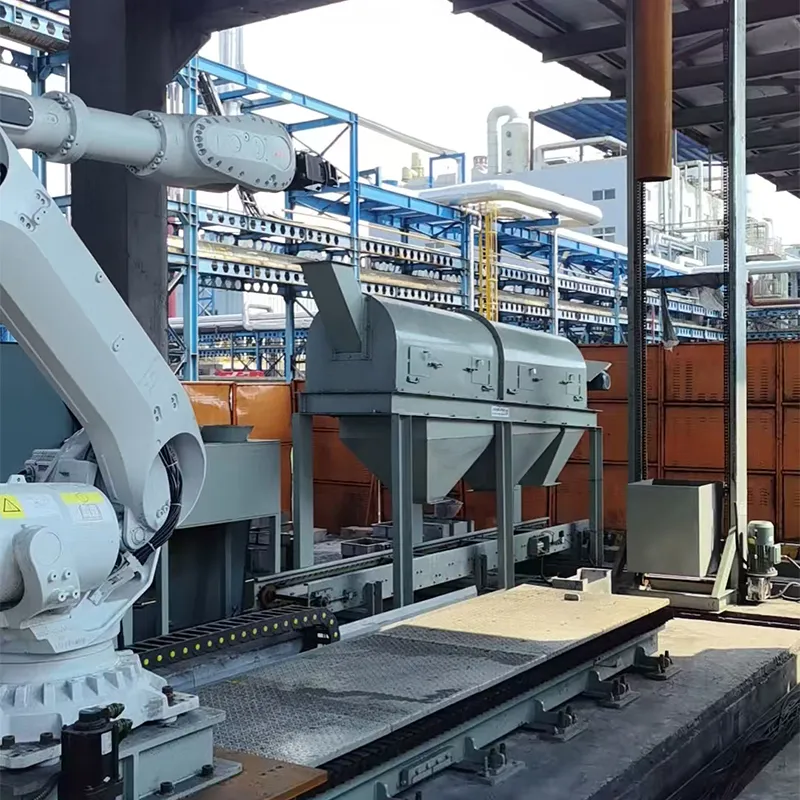
 Система отбора и пробоподготовки в вагонах с помощью промышленных роботов
Система отбора и пробоподготовки в вагонах с помощью промышленных роботов -
 Шлифовальная машина
Шлифовальная машина -
 Система пробоподготовки для промышленных роботов в угольной промышленности
Система пробоподготовки для промышленных роботов в угольной промышленности -
 Высокоточный интеллектуальный столбчатый ленточный весоизмеритель
Высокоточный интеллектуальный столбчатый ленточный весоизмеритель -
 Валковая дробилка
Валковая дробилка -
 Дробилка челюстная
Дробилка челюстная -
 Система отбора и пробоподготовки в средней части ленточного конвейера
Система отбора и пробоподготовки в средней части ленточного конвейера -
 Система пробоподготовки для промышленных роботов в коксовой промышленности
Система пробоподготовки для промышленных роботов в коксовой промышленности -
 Система отбора и пробоподготовки на головке ленточного конвейера
Система отбора и пробоподготовки на головке ленточного конвейера -
 Ротационный прободелитель
Ротационный прободелитель